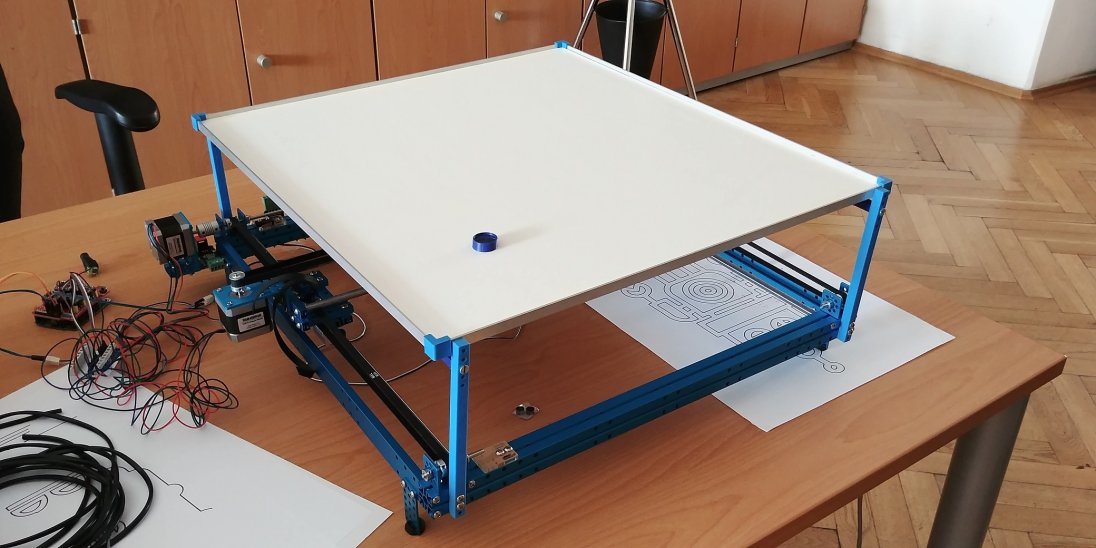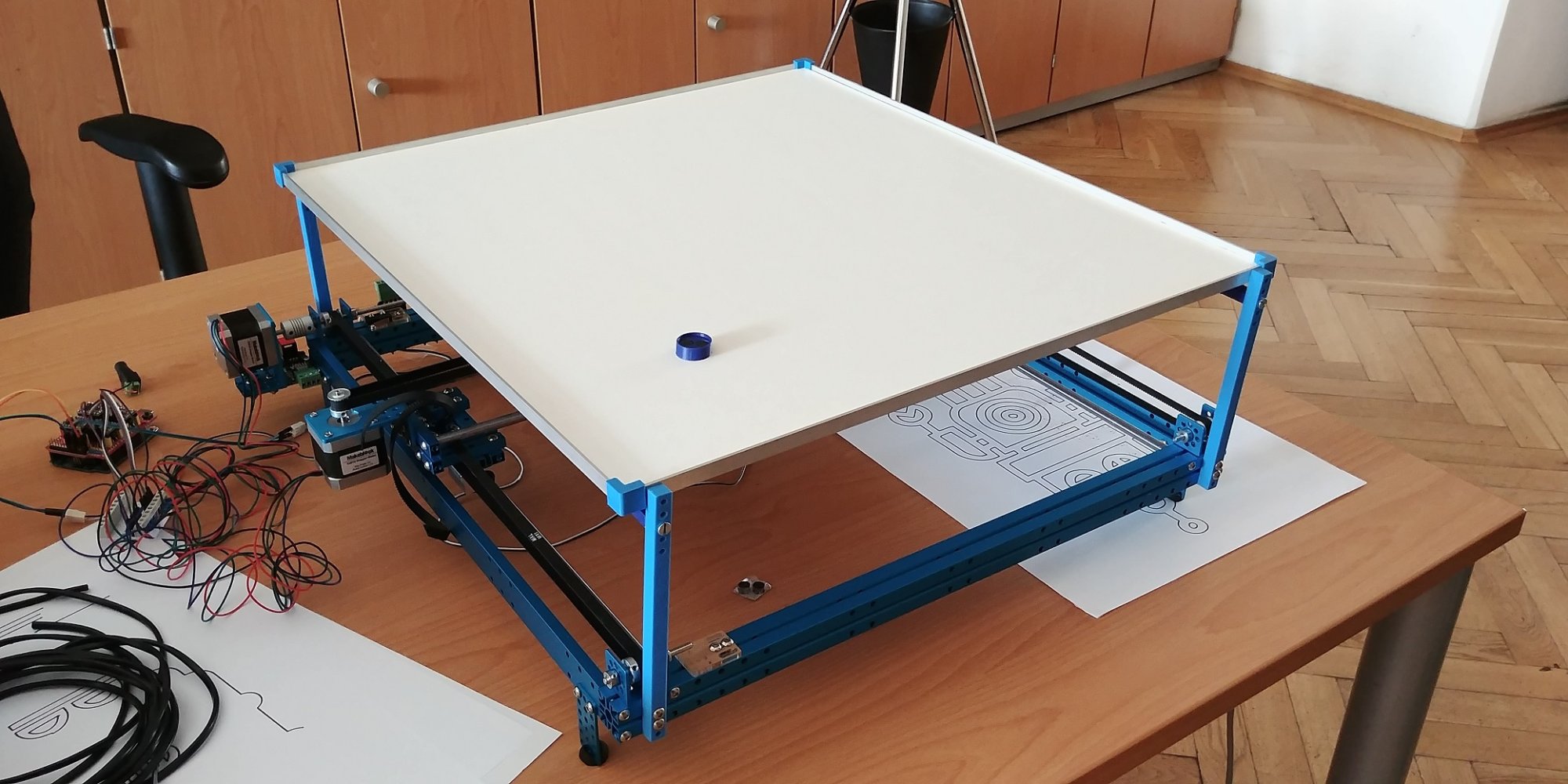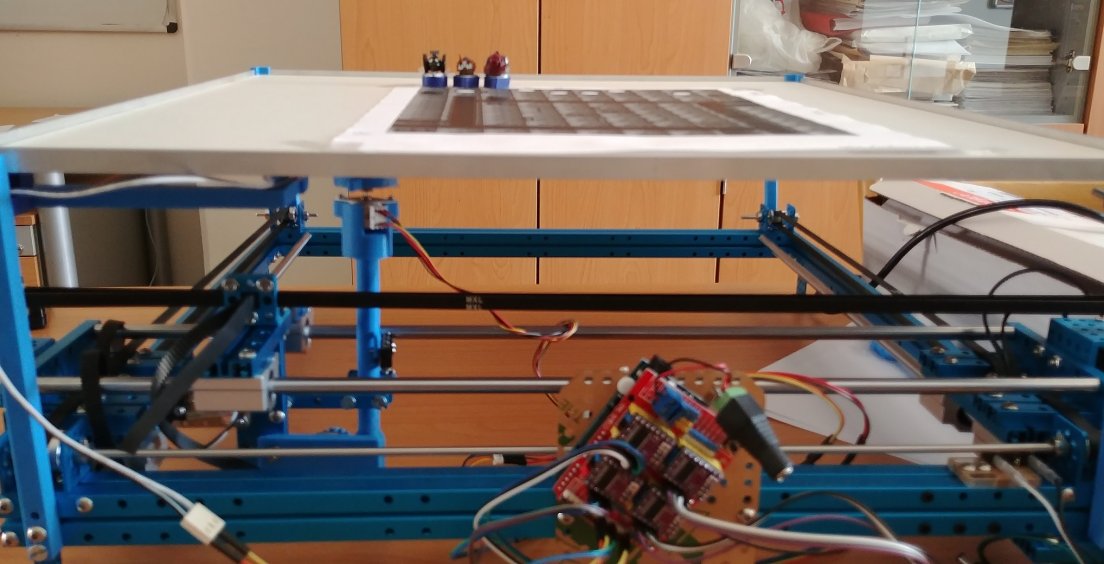
Cieľom projektu bolo naimplementovať simulátor spoločenskej hry RoboRally, v ktorom by boli fyzicky zachované centrálne prvky hry, teda figúrky robotov a herný plán. Hráči však interagujú s hrou bez priameho kontaktu pomocou mobilnej aplikácie a pohyb robotov po fyzickom hernom pláne zabezpečuje modifikovaný 2D plotter.
V hre RoboRally naviguje každý hráč na hernom pláne svojho robota s cieľom previezť ho čo najrýchlejšie jednotlivými kontrolnými miestami. Samotná hra je rozdelená na kolá. Na začiatku každého kola obdržia hráči karty so základnými inštrukciami pre ovládanie robotov (napr. pohyb vpred alebo otočenie). Každý hráč si vyberie päť z týchto kariet a použije ich k vytvoreniu programu svojho robota. V momente, kedy všetci hráči pripravia programy pre svojich robotov, jednotlivé inštrukcie sú postupne realizované. Počas realizácie inštrukcií sa môžu roboti navzájom narážať či strieľať a zároveň sú ovplyvňovaní aj niektorými políčkami mapy, kde môžu byť napríklad lasery alebo posuvné pásy.